
Test results developed by the fully self - balanced stretcher
2 test results
After a year of research and development and manufacturing, we have developed the omnidirectional self-balancing stretcher, the car after several tests have been basically consistent with the original technical parameters, in the field of complex road walking, self-balancing accuracy control in 1 ° range.
2.1 Self-balancing mechanism of the test
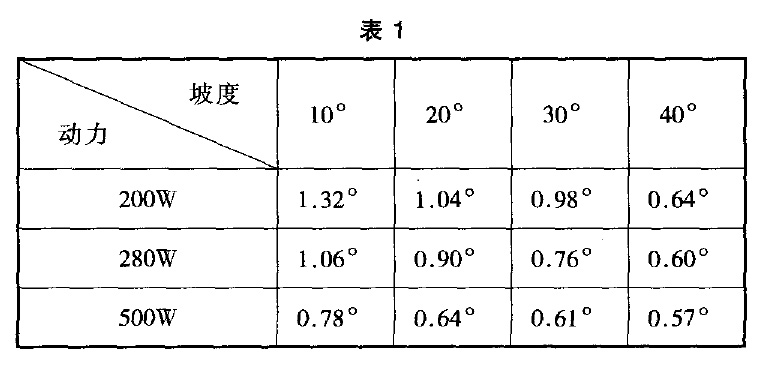
The self-balancing mechanism of the omnidirectional self-balancing stretcher is subjected to different self-balancing control to drive the motor, and the test data in Table 1 are obtained when the crawl size is different. It is shown that the accuracy of the self-balancing control drive motor is greater when the same level is used to detect the instrument, and the accuracy of the self-balancing level control of the stretcher is smaller. When the slope of the climb is larger, The accuracy of the self-balanced level control is also smaller. So we finally decided to use 500 stepper motor as the control level of the power drive.
2.2 Walking driving test of the stretcher
The use of 20W motor drive can be empty on the ground in the use of 40W motor drive can be loaded with a 30kg children under the premise of the use of anti-vehicle, , When climbing l5 ° slope; when the motor power loaded to 100W, you can load less than 60kg adult lying 30 ° slope; and the motor loaded to 280W, the body can carry 150kg items, climb 40 ° slope. Therefore, for the sake of safety, the stretcher has finally adopted a 280W motor as the driving force of the walking mechanism.
 Official WeChat
Official WeChat